Oct 29, 2023
Global Navigation Satellite System (GLONASS) – Understanding Network and Security for Far-Edge Computing
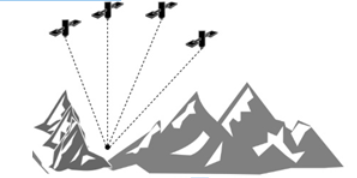
Contemporaneously with the rollout of the US’s GPS, the Soviet Union began deployment of a similar system known as GLONASS. The first satellite was launched in 1982 and has continued to be developed by the Russian Federation and operated by Roscosmos. Due to economic constraints in the 1990s/2000s followed by sanction-related obstacles in the 2010s, GLONASS has faced numerous challenges. However, it remains operational and available for anyone to use.
Compared to GPS, GLONASS is less accurate on average (though only slightly). That said, due to the different configuration of its orbits, GLONASS is a bit more accurate than GPS at high latitudes (such as within the Arctic or Antarctic circles).
Galileo
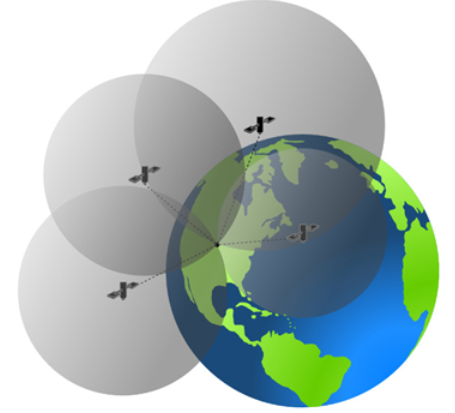
Created by the European Union via the European Space Agency, Galileo is a multinational effort to operate a global positioning system that provides independence from single-country control as is seen with GPS and GLONASS. The system went live in 2016 and currently operates 30 satellites in MEO.
At the time of writing, Galileo is the most accurate of the three global systems for the average user.
Regional and augmentation systems
In addition to the three global systems, there are a few regional and augmentation systems. These include the following:
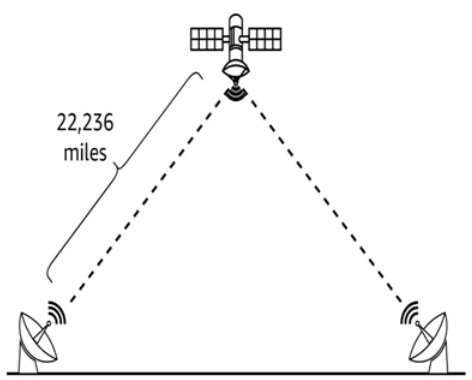
Quasi-Zenith Satellite System (QZSS): Operated by Japan, QZSS uses a combination of satellites in geostationary and highly elliptical orbits to augment GPS, improving performance for terminals in Japan and the surrounding region.
Navigation Indian Constellation (NAVIC): Deployed by India, NAVIC uses a handful of geostationary satellites to improve performance for GPS terminals in South Asia.
Wide Area Augmentation System (WAAS): The US Federal Aviation Agency (FAA) operates three satellites in geostationary orbit to improve navigation for civilian aircraft in North America.
European Geostationary Navigation Overlay Service (EGNOS): A distinct system from Galileo, EGNOS is a set of three geostationary satellites that augment GPS for European users. Future plans include the ability to augment the Galileo system as well.
Other uses for GNSS
When a very precise clock source is needed that is accurate down to nanoseconds, expensive atomic clocks are one approach. However, because GNSS satellites have one or more atomic clocks onboard, their signals can be used to indirectly gain access to a free atomic clock. For example, 5G NFV functions, or virtual machines running a Software-Defined Radio (SDR) application require access to a physical clock. Network Time Protocol (NTP) or Precision Time Protocol (PTP) servers frequently save money by making use of GNSS signals.
Summary
In this chapter, we introduced you to elements that are common to all wireless communication technologies that are used at the far edge – concepts such as wavelength, frequency, duplexing, modulation, multipathing, and antenna design.
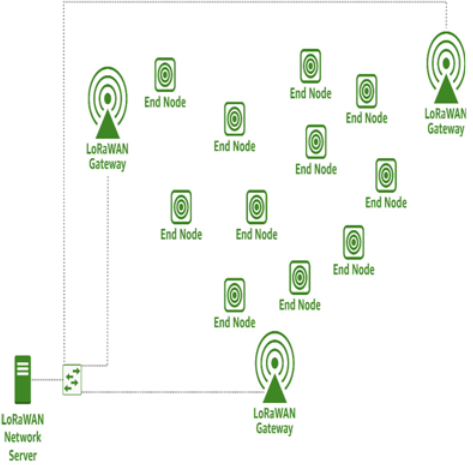
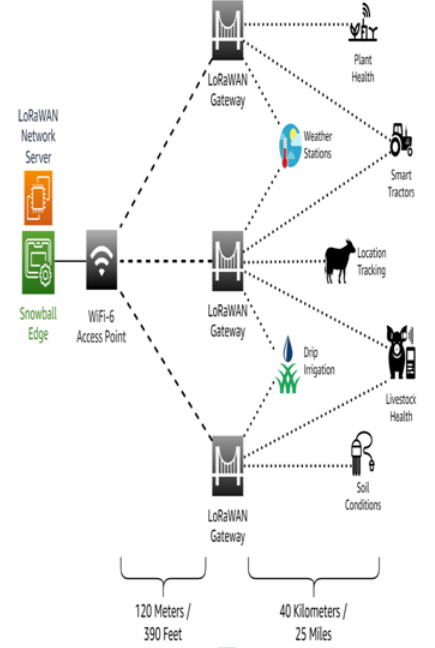
We built upon that by diving into cellular networking technologies such as 4G/LTE and 5G, reviewing the key advantages of 5G networks and how they enable new low-latency/high-throughput use cases. You were given a survey of LPWAN technologies such as LoRaWAN and NB-IoT, both of which are crucial to use cases such as smart agriculture, V2X, and smart cities.
Finally, we discussed the basics needed to understand SATCOM technologies and the services based on them – upon which the most remote edge computing use cases are dependent.
In the next chapter, we will cover the AWS Snow family of services. These target remote/disconnected edge compute situations.
More Details